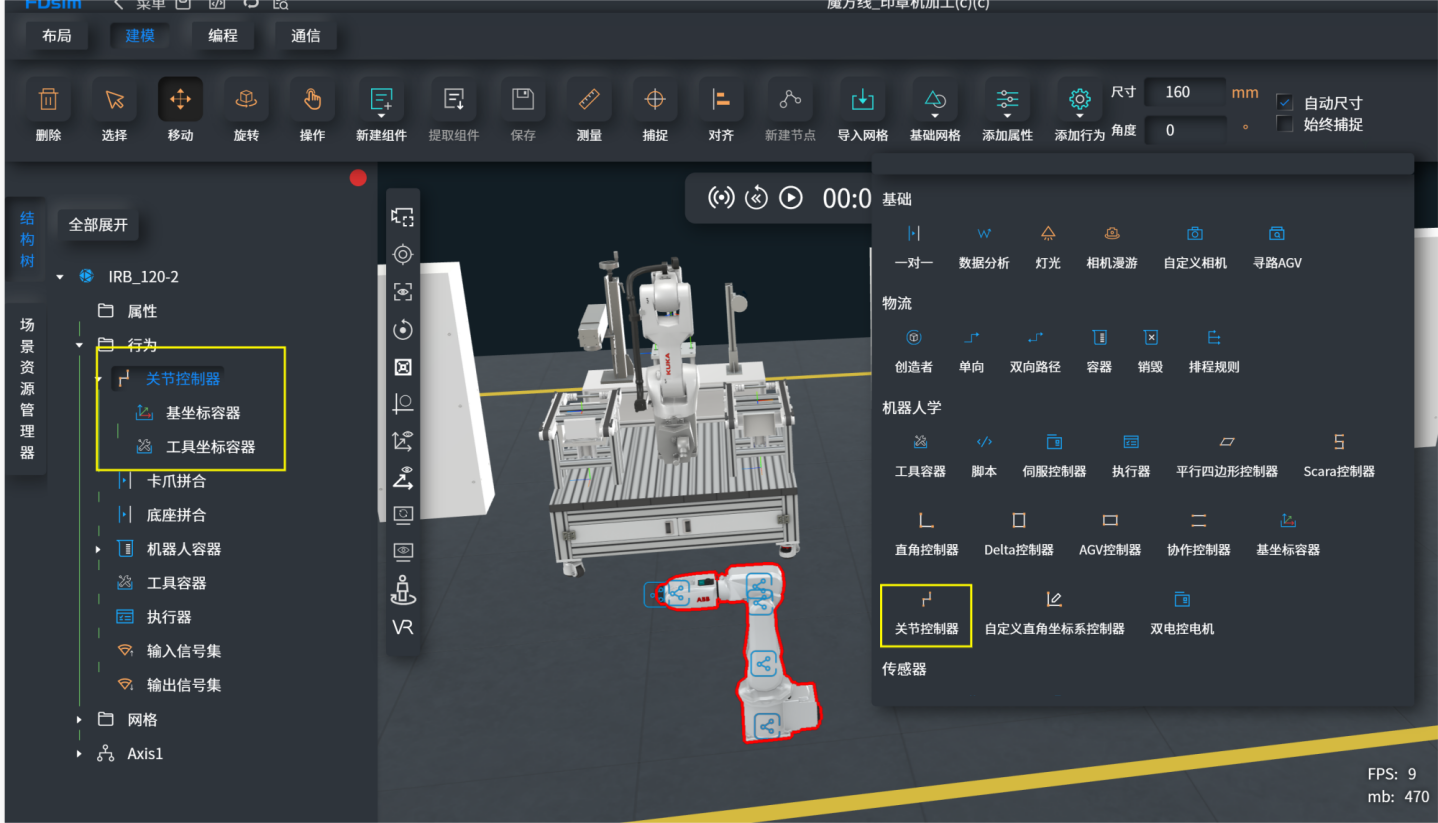
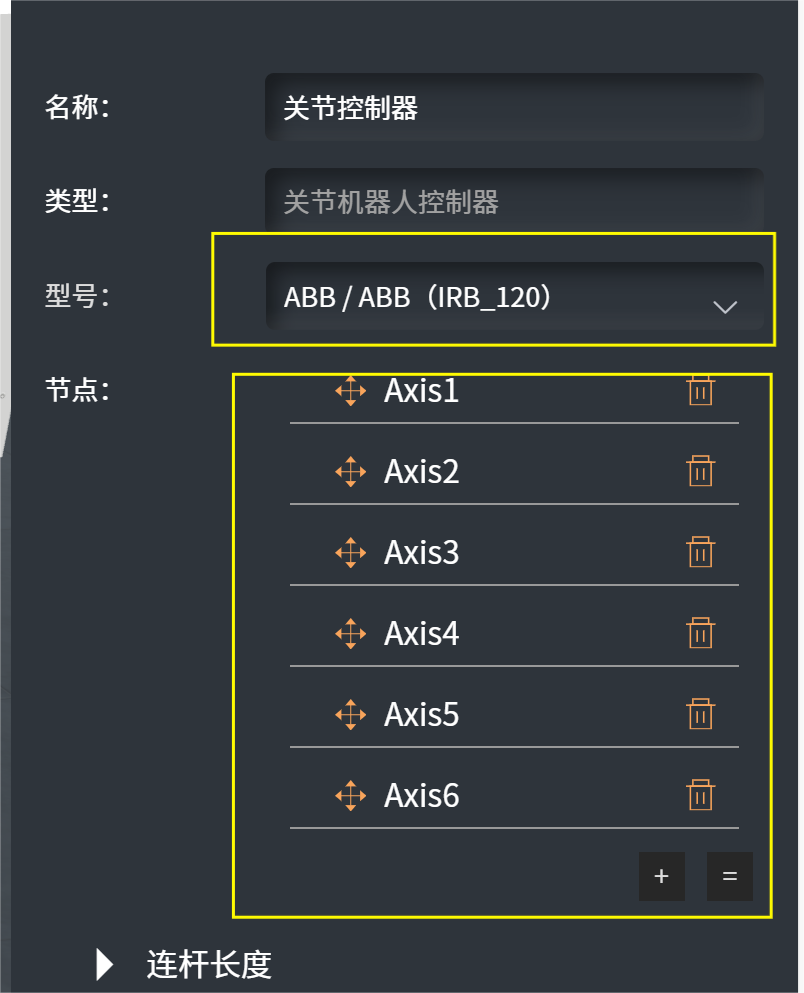
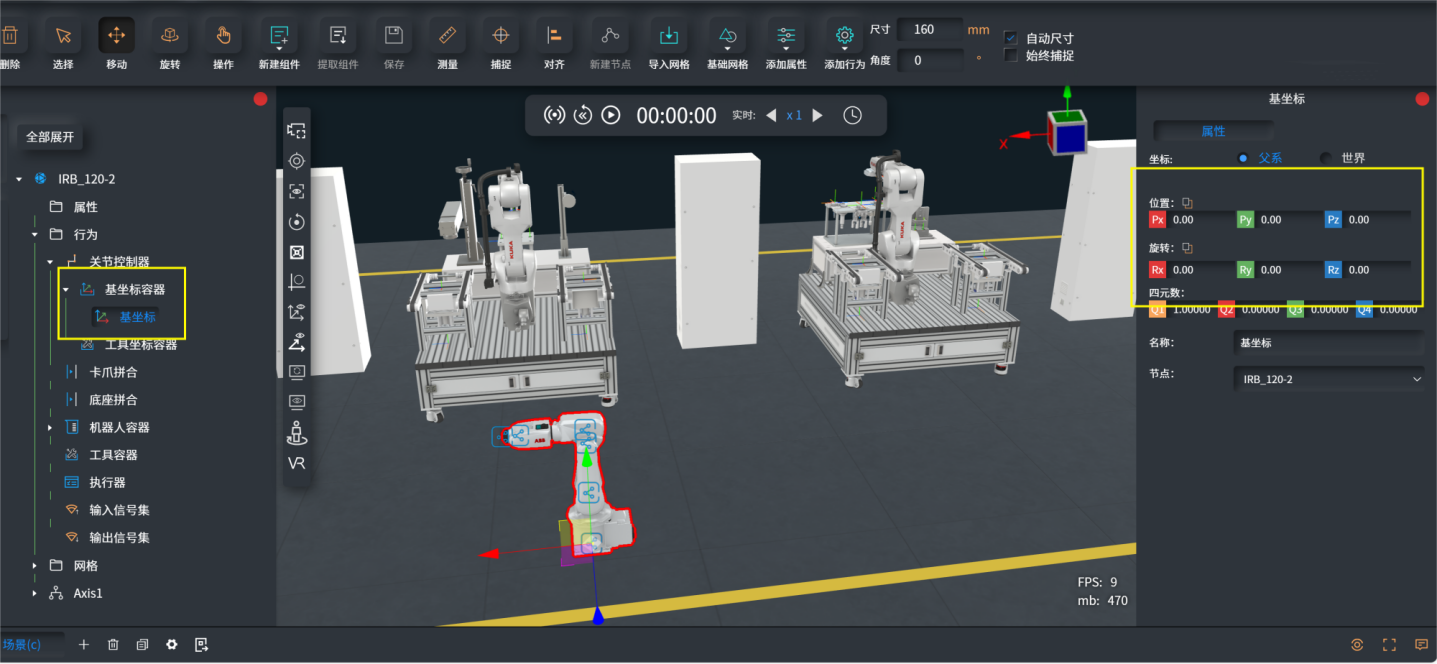
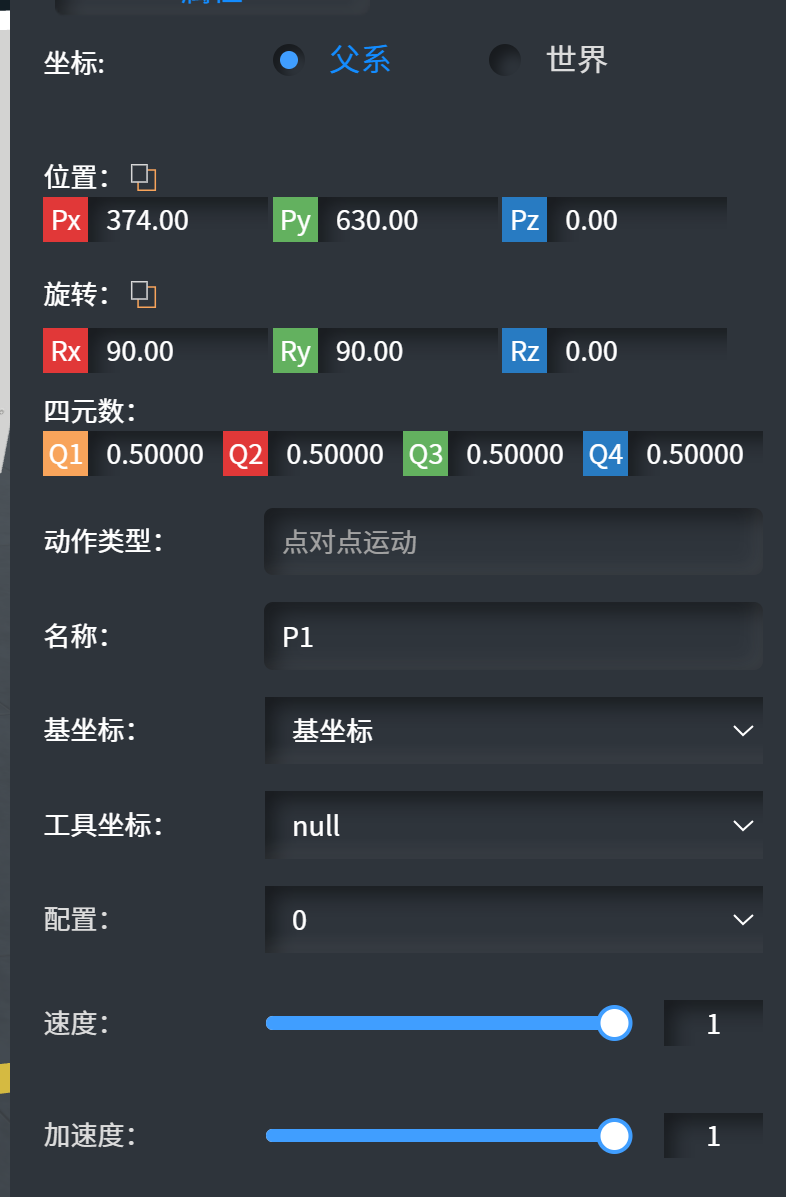
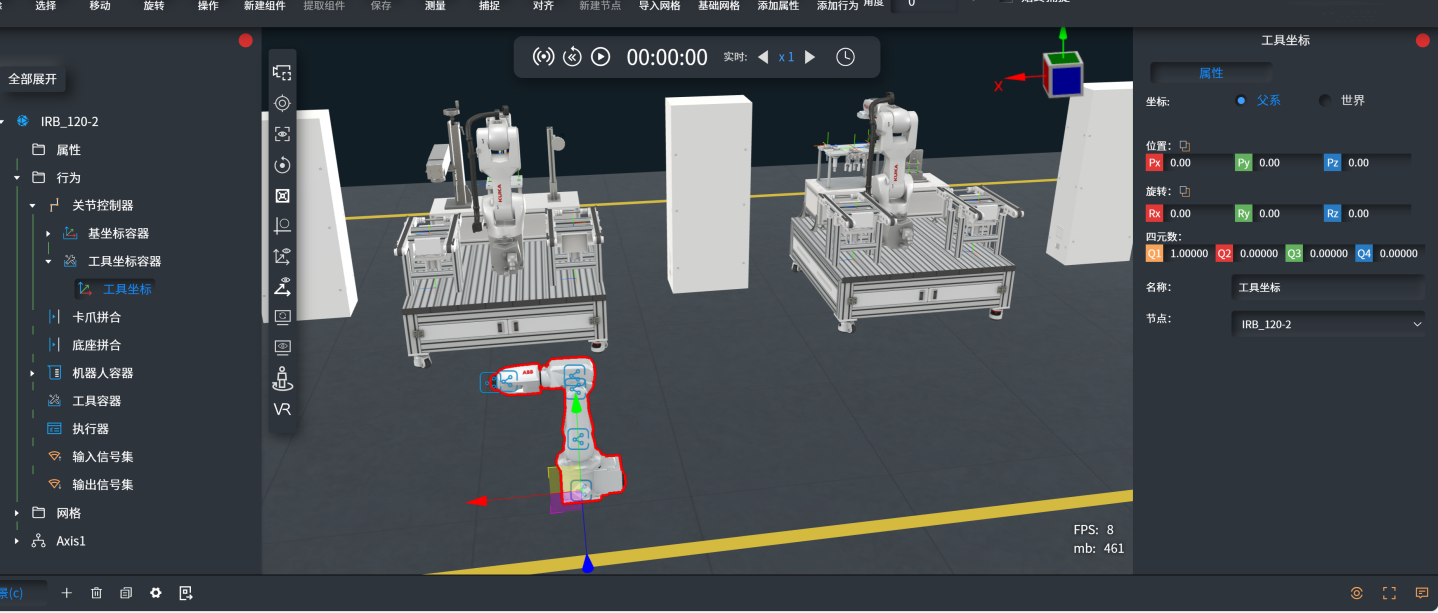
点击关节控制器,可以为组件添加关节控制器。关节控制器是常见的机器人类型。 关节控制器需要添加6个关节,并设定机器人型号。完成设置后可以将该型号的机器人运动逻辑导入该组件。 机器人控制器可以设置即坐标。在机器人编程中可以选择基座标,将基座表作为机器人运动坐标判断的原点。 机器人还能添加工具坐标容器,这一坐标可以在机器人编程中设置,用以代替机器人的末端点参与运动判断。