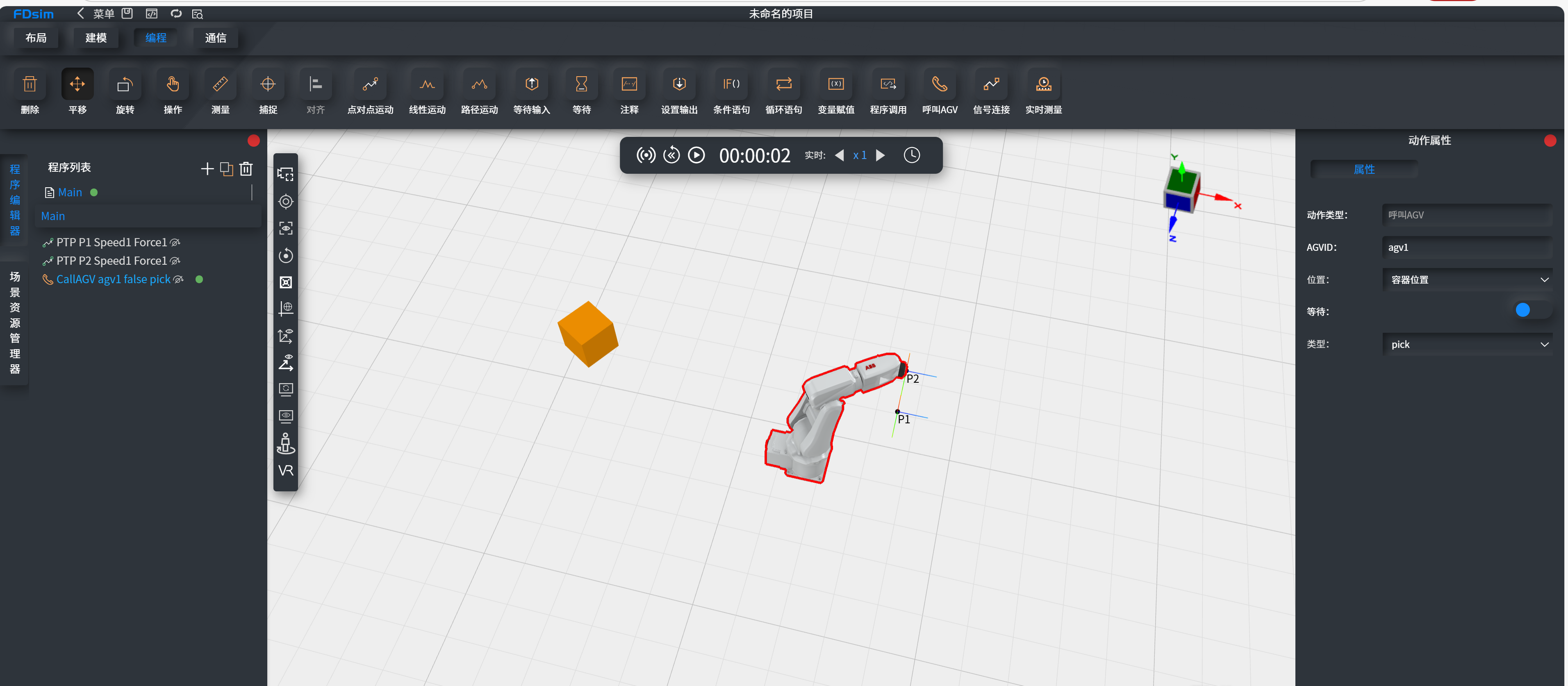
1.对于进行了程序控制设置AGV控制器设置的组件,可以直接使用编程模式下的点对点运动设置其运动点位。 2.对于寻路AGV设置,使用其他机器人进行呼叫AGV编程,输入机器人id和定位坐标,即可呼叫AGV到达目标位置。