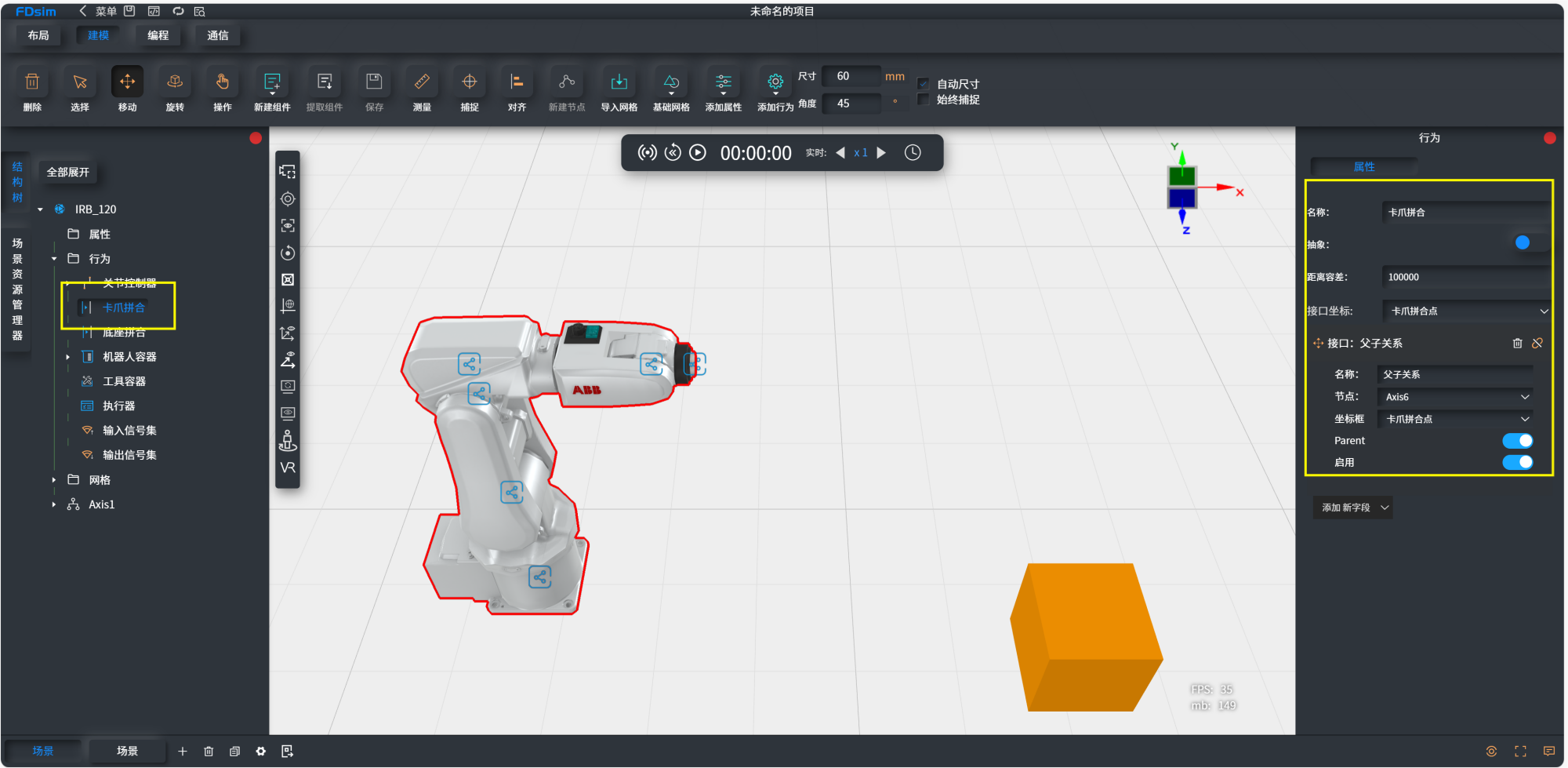
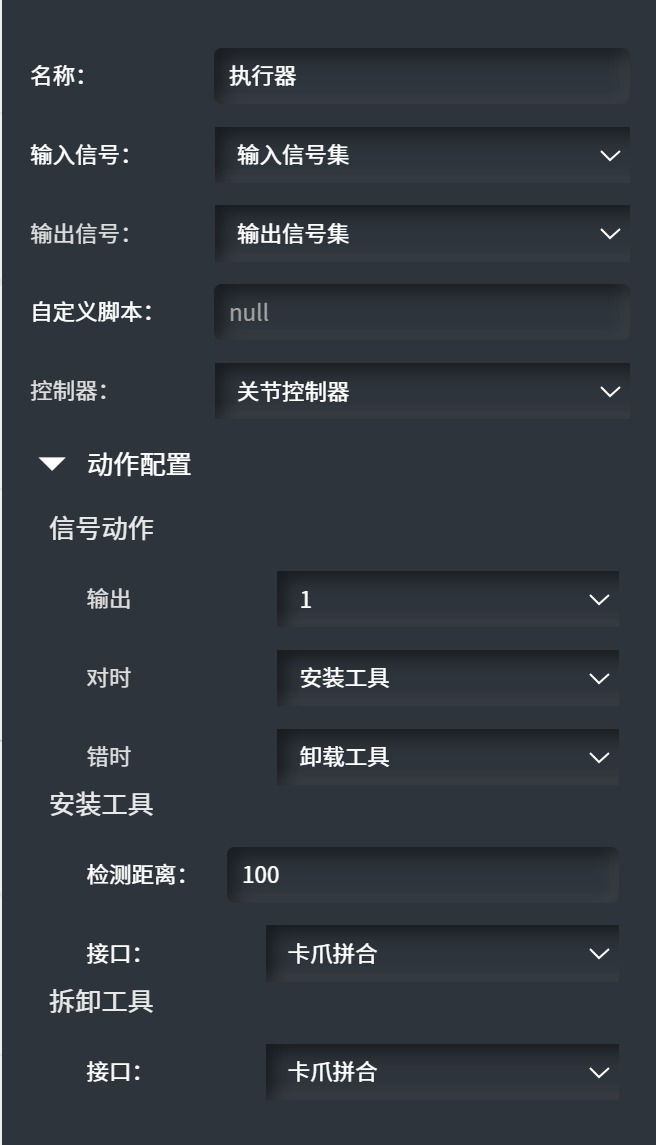
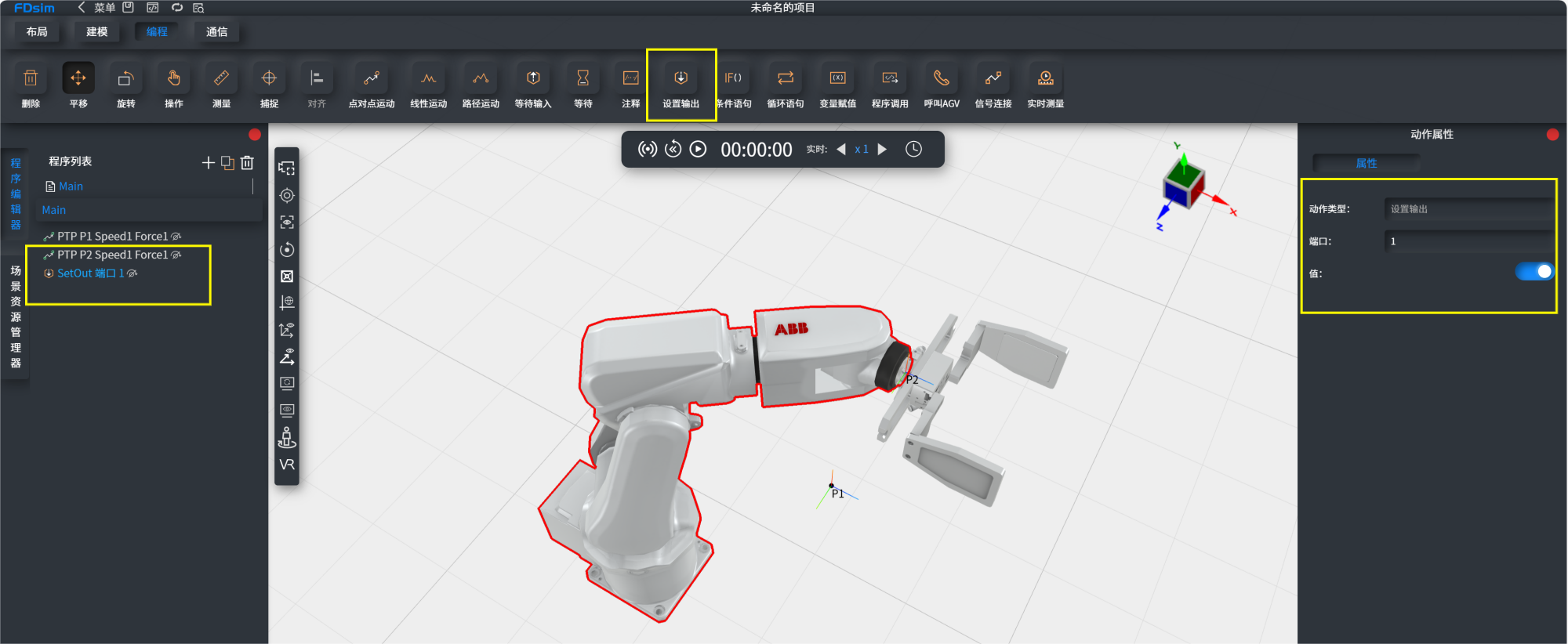
1.机器人需要设置卡爪拼合点。拼合位置设置在与卡爪的拼合点处。打开parent 2.机器人执行器中完成卡爪设置。 在执行器中设置安装、卸载工具,并设置卡爪拼合为其接口。记住这一动作使用的端口。 3.运动到合适点位时使用设置输出,在合适点位输出信号。控制信号值即可装载、拆卸夹爪。