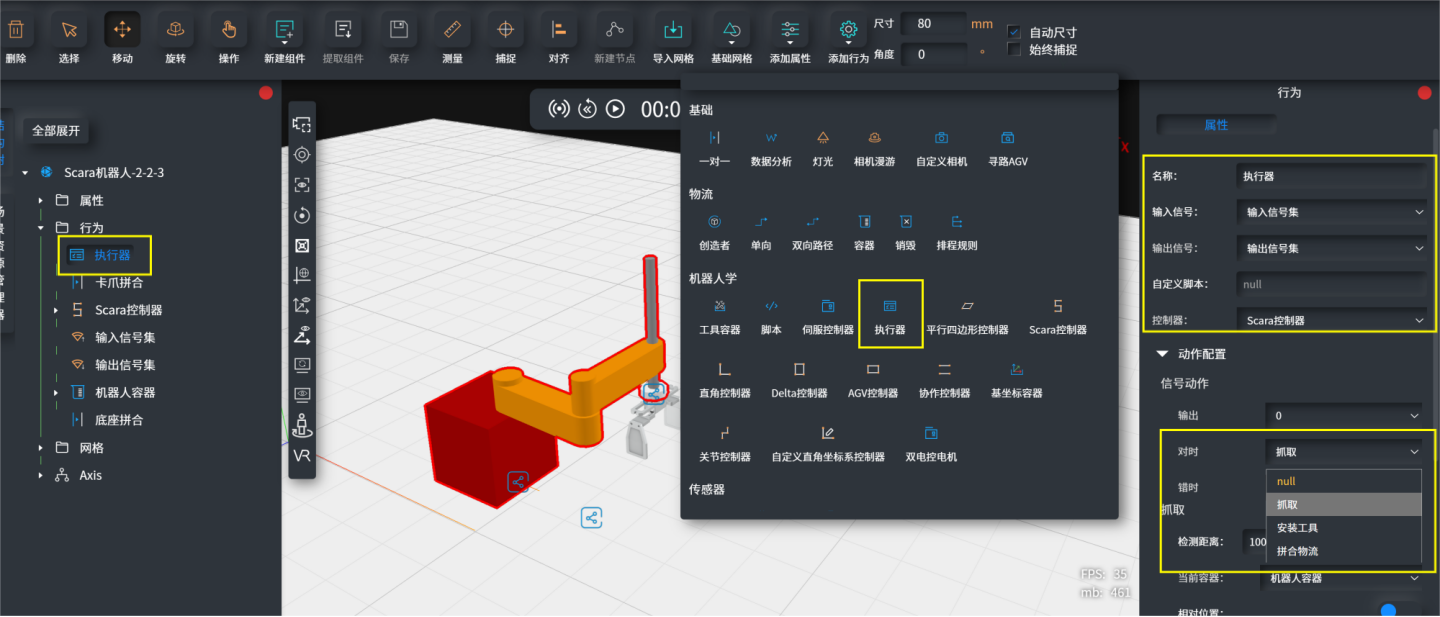
点击执行器,可以为组件设置执行器。执行器用以完善机器人功能。其中,需要设置输入输出型号集合和机器人控制器,同时可以设置机器人在对应端口发出对时信号时作出的动作,包括抓取与释放、安装与拆卸工具(拼合)和拼合与分离物流等。