跳至主要內容
帮助中心
9.6 如何控制机器人抓取释放产品
FDSim
2025/9/22
小于 1 分钟
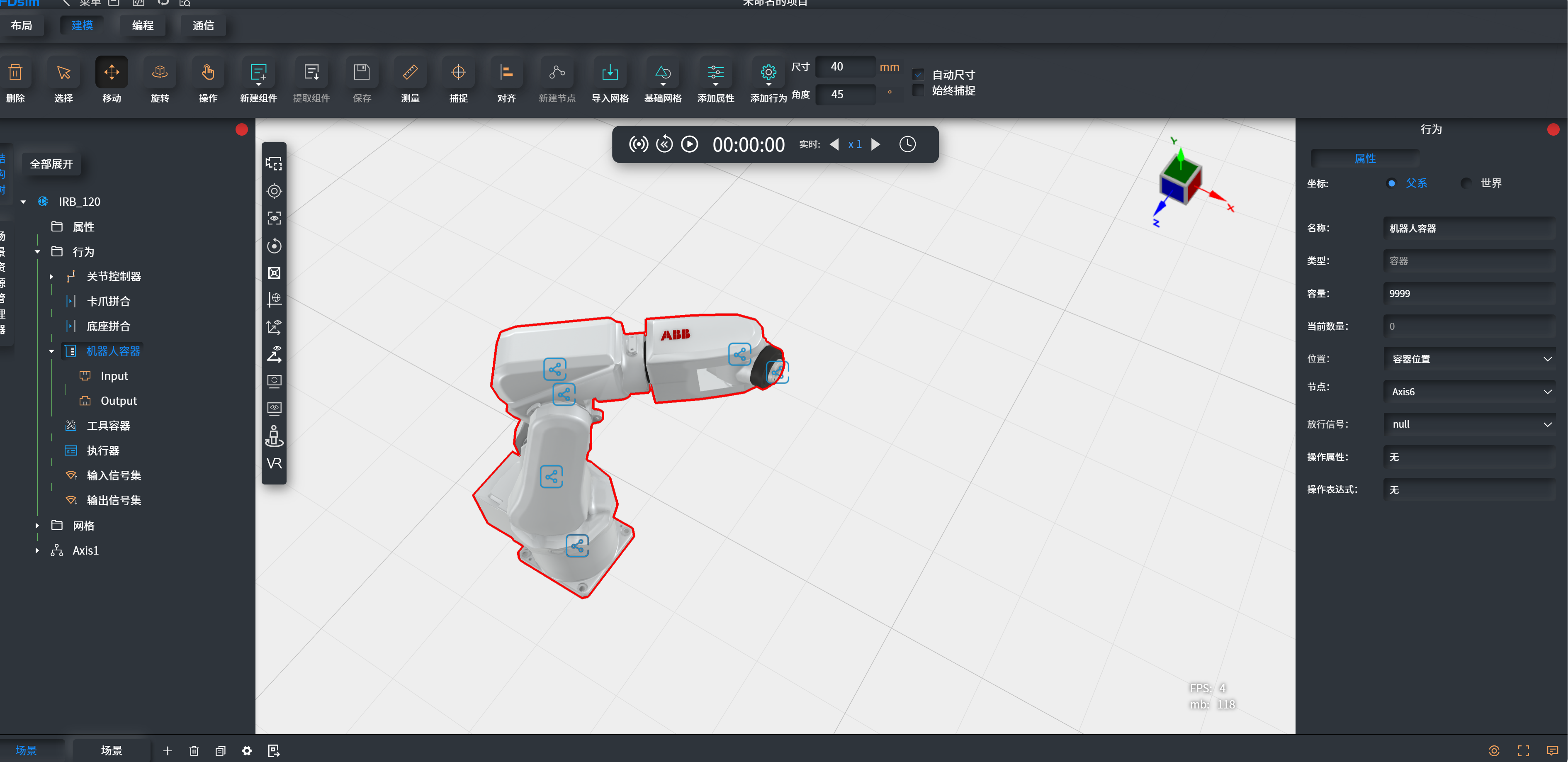
1.机器人需要设置容器。
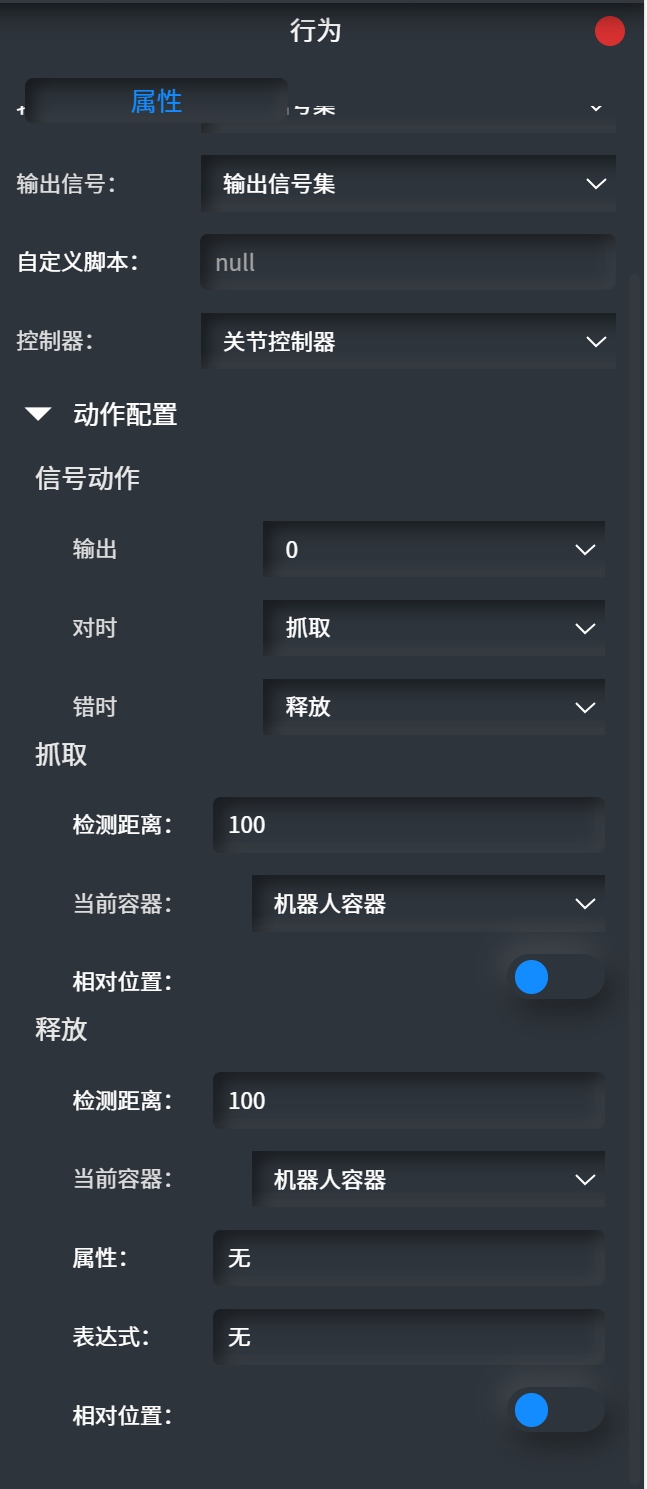
2.在机器人执行器中进行设置,设置抓取范围,信号端口和容器。如果打开相对位置,则物料抓取成功后会与机器人抓取点位保持相对位置。
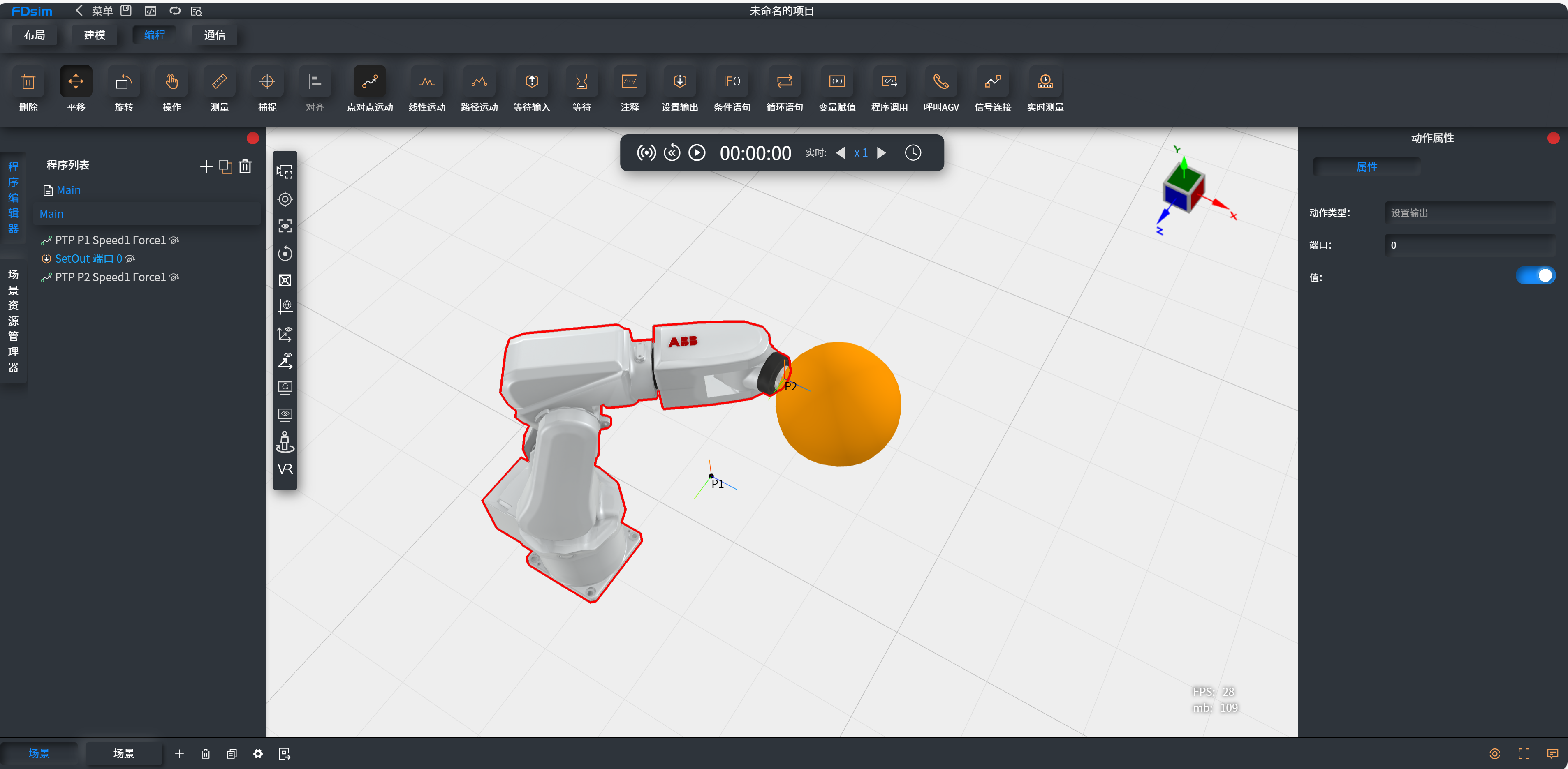
3.在合适位置发送信号,可以抓取物料
上一页
9.5 如何控制机器人安装卸载卡爪
下一页
9.7 如何添加AGV程序